
Robociders
Harvard John A. Paulson School of Engineering and Applied Sciences
ES 51: Computer-Aided Machine Design Spring 2016
{2016 Turf Wars Competition - 4th Place Finisher (from 16 teams)}
Challenge
Design and build a motorized mechanical robot that must be maneuvered across a competition board, containing several objects and obstacles. To score points, either: collect tennis balls and place them onto a vertical velcro wall until making a tic-tac-toe formation, or scale an astroturf-pipe ramp.
Engineering the Tennis Ball Gripper
Brainstorming
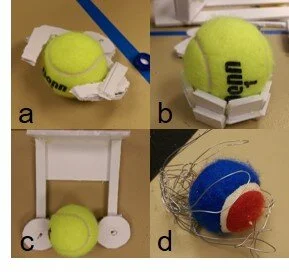
Within a team of 4, I was responsible for designing a functional gripper used to hold the tennis balls. Four preliminary prototypes were built (as shown above). After rationalizing the possibilities on a pugh matrix, we went with design a due to its high structural integrity, and optimal ball capture/pushing onto velcro wall abilities.

Designing the Gripper
Circumferential measurements of the tennis ball contributed greatly to the grippers’ design, in order to facilitate grab and placement. By optimizing a close fit tolerance between both surfaces, the tennis ball could easily travel long distances without being dropped prematurely.

Prototyping
To minimize stress at the robot arm’s joint and on the motors, acrylic (a lightweight material) was used for the grabber’s base. Rather than having to focus on dual gripper finger movement, fishing line was used to only move one. This facilitated tennis ball capture within the given time constraints.









Robocider in Action
